I think I just had a moment of enlightenment!
Thanks for this last nugget @Elco.
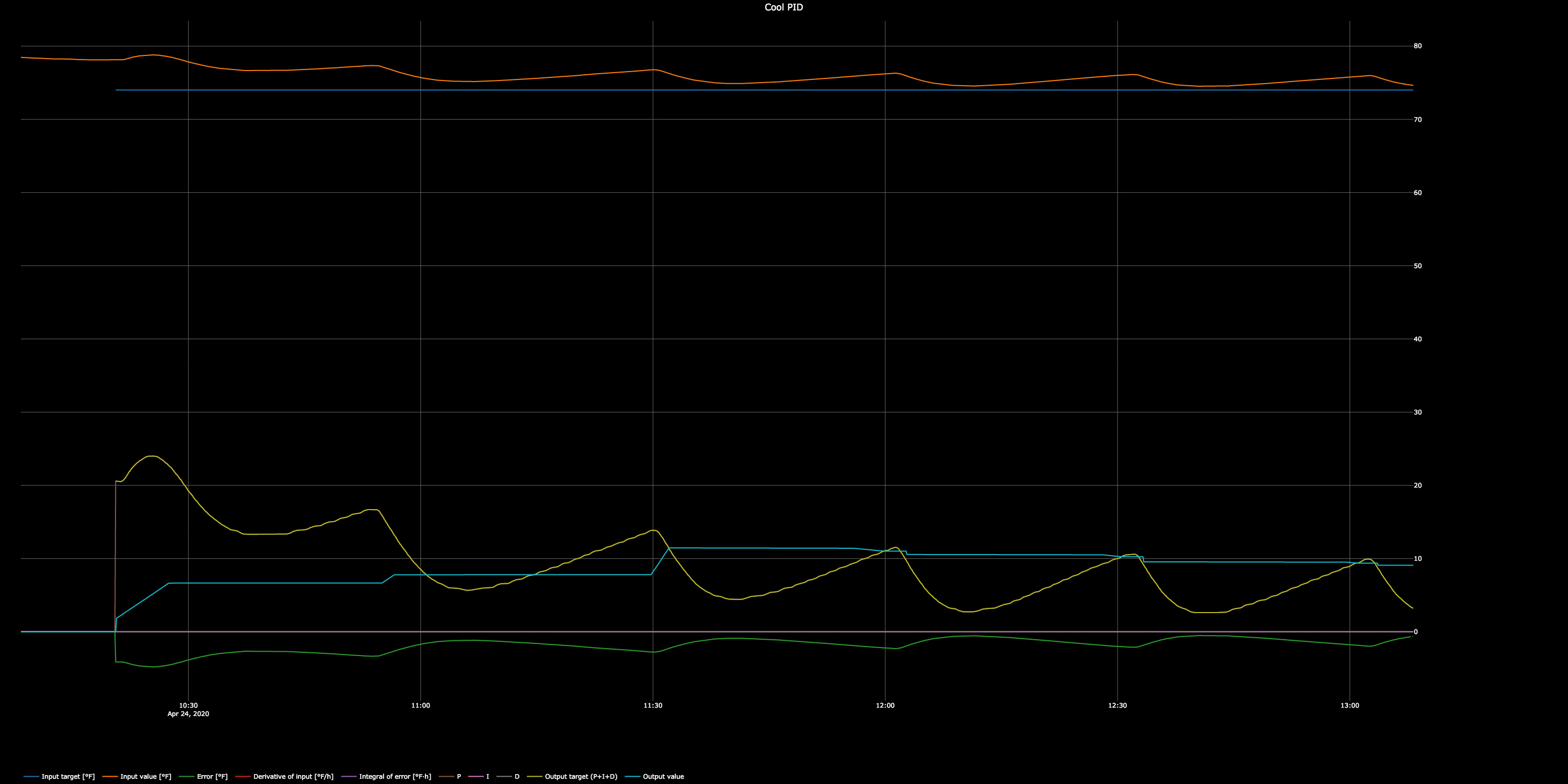
I should be seeing how the PWM duty responds to the PID settings, not the actuator and temperature.
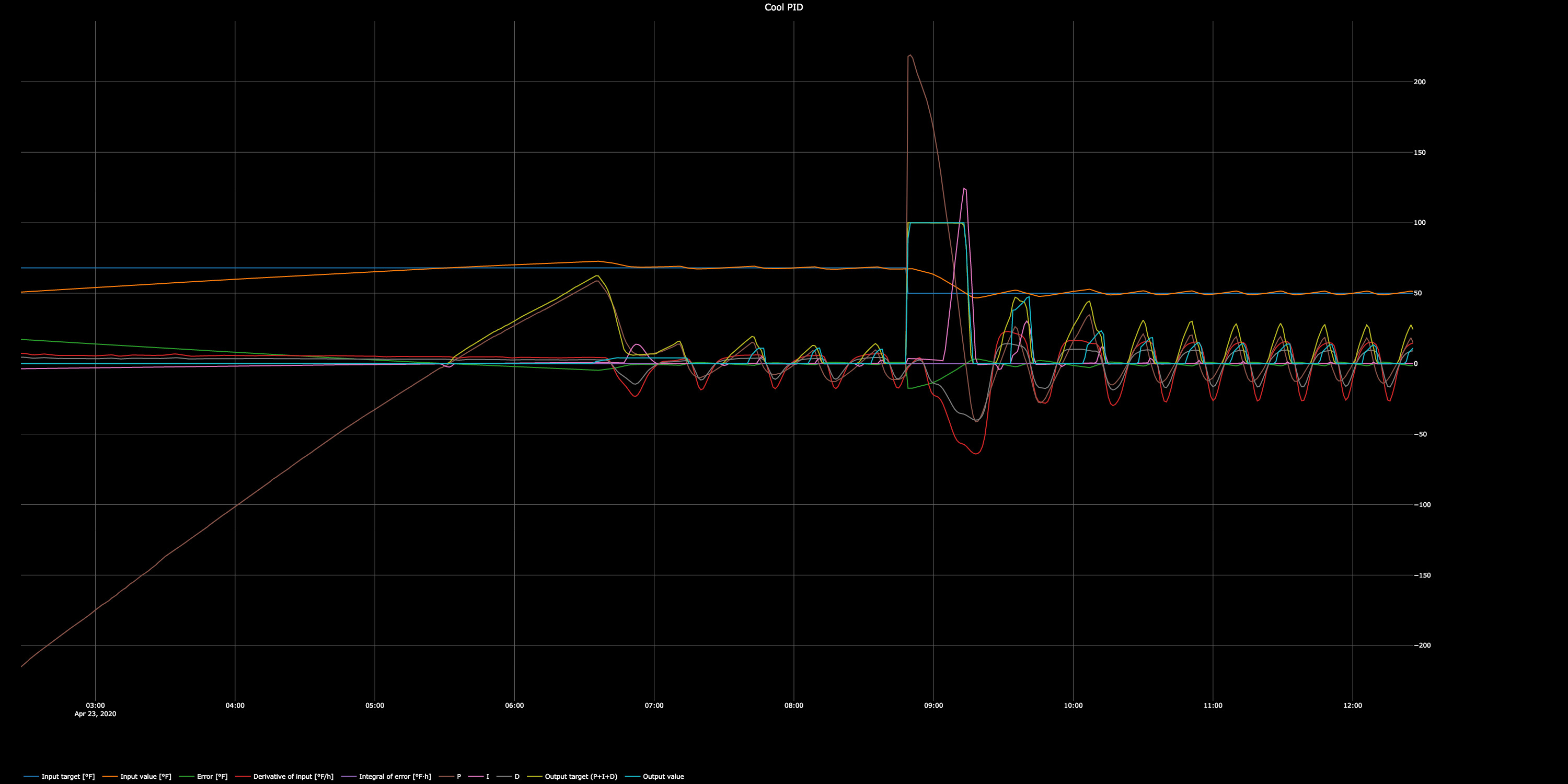
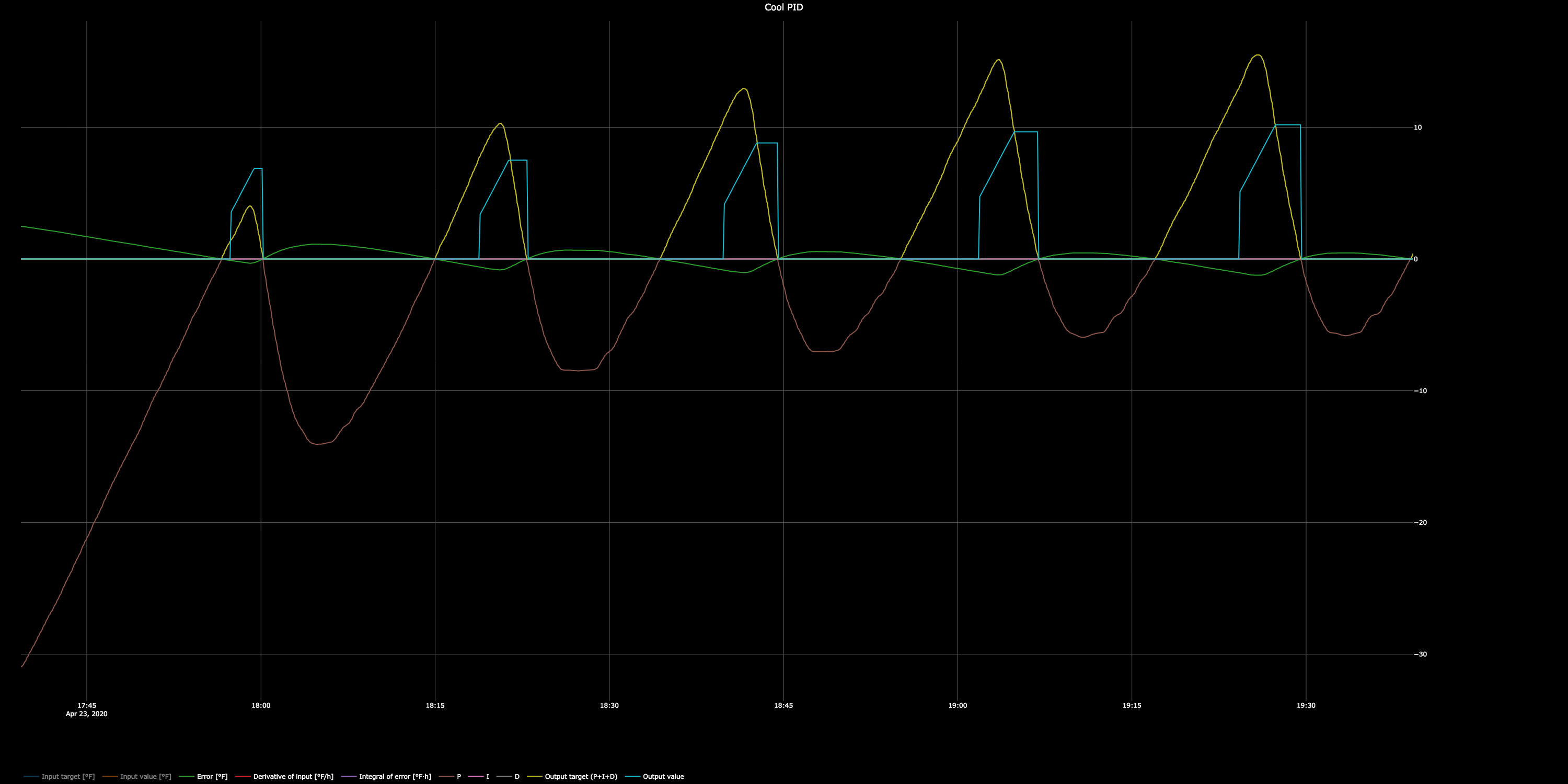
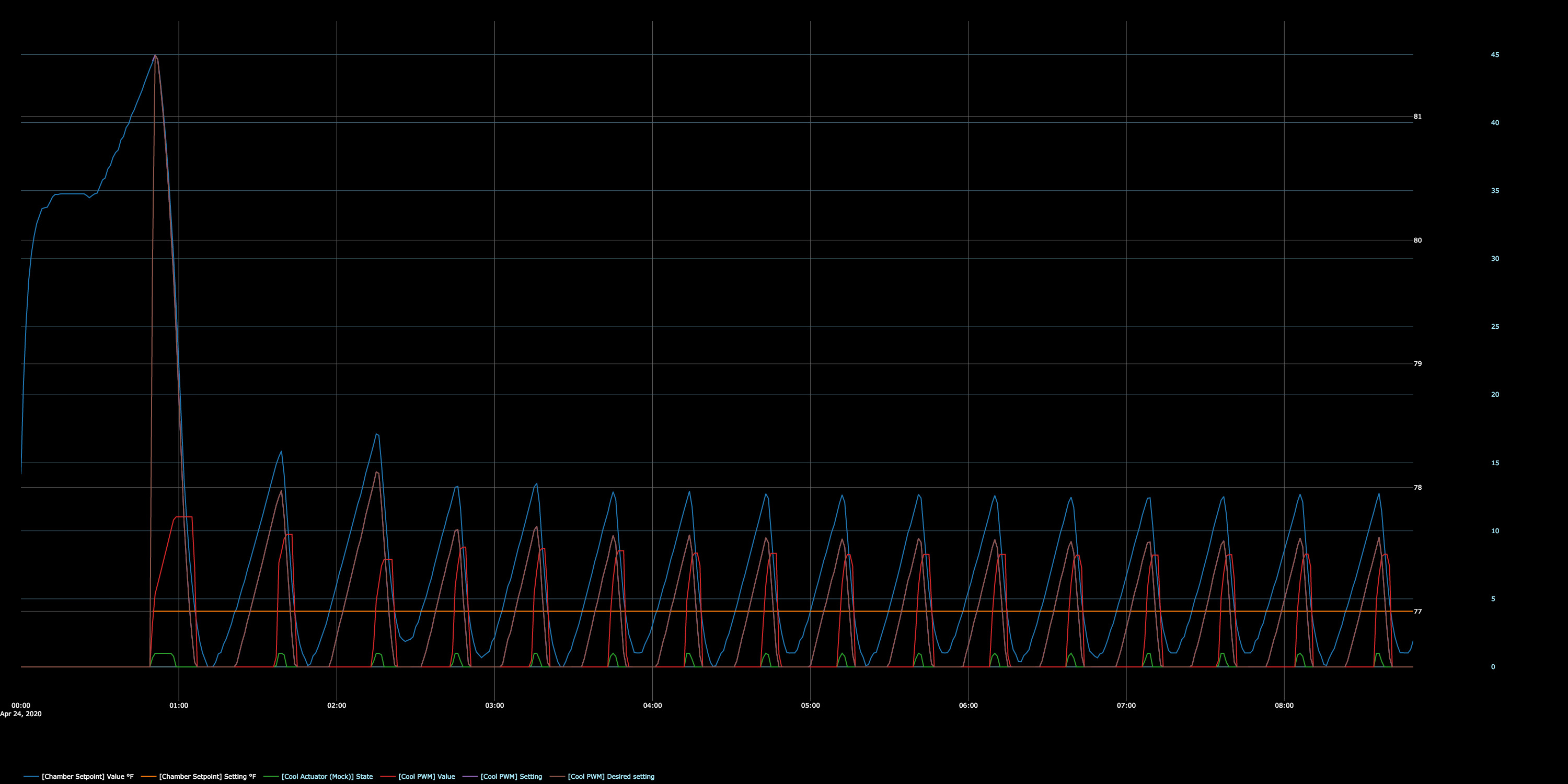
Have a gander at this graph from last night where Kp = -10.
Ambient had cooled off to ~81°F. Setpoint = 77°F.
I am thinking the PWM desired setting is what I am tuning for here.
After the initial cycle, the next two cycles have a higher PWM desired setting then the steady state.
I can’t tell if this is because the system is too slow to respond (Kp too low) or because it is ringing (Kp too high).
A couple more theoretical questions…
When discussing setting appropriate Td and Ti durations, the time it takes for the system to settle and system response time is discussed.
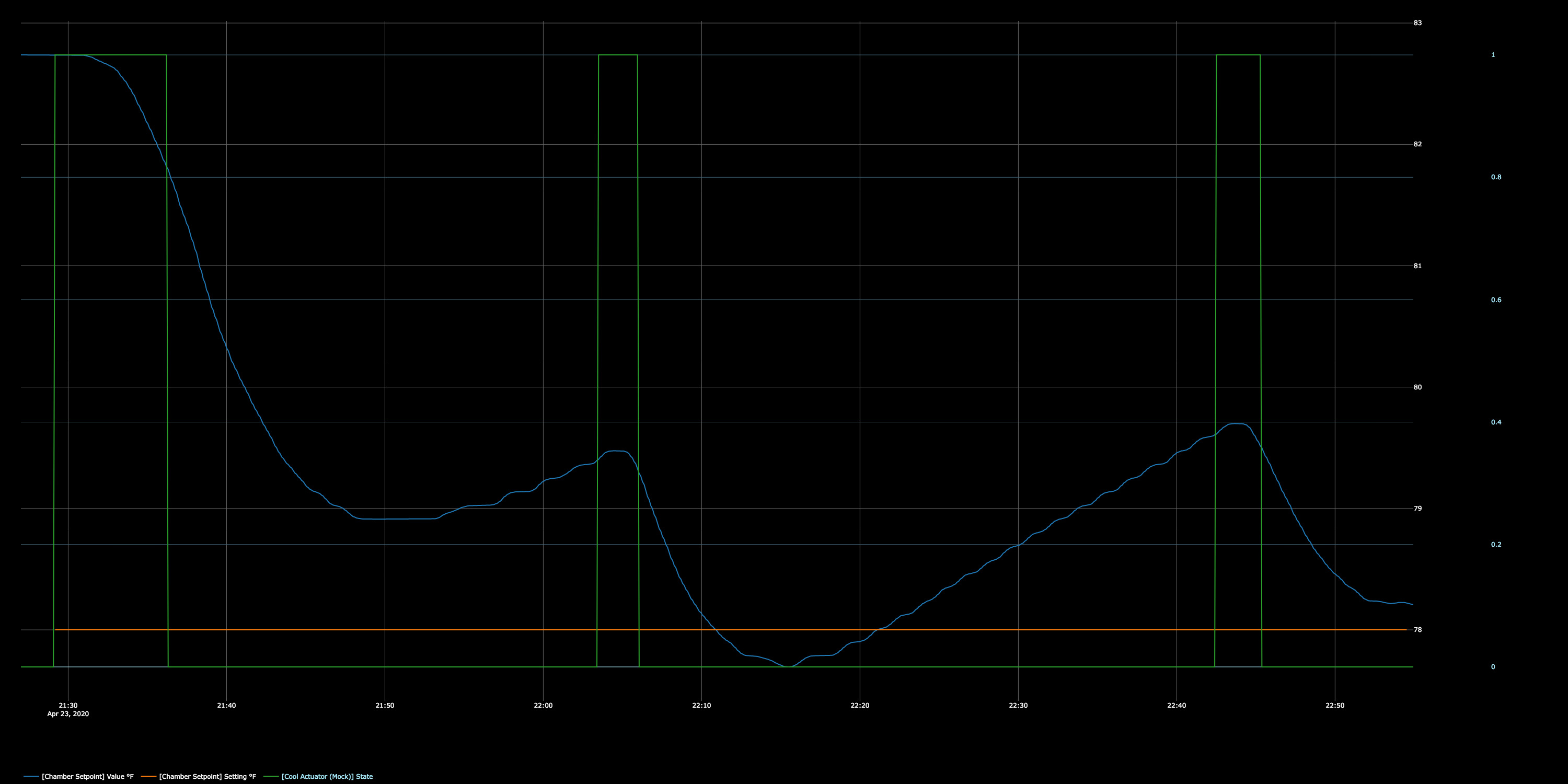
On this graph I posted above, is the time it takes for the system to settle measured from the initial cycle’s actuator off time until the temperature first goes horizontal?
Or is it from the actuator off time until the steady state PWM desired setting is achieved (3rd sawtooth after the initial cycle)?
What about system response time?
It would be helpful to see how you would deduce Ti and Td from this graph.
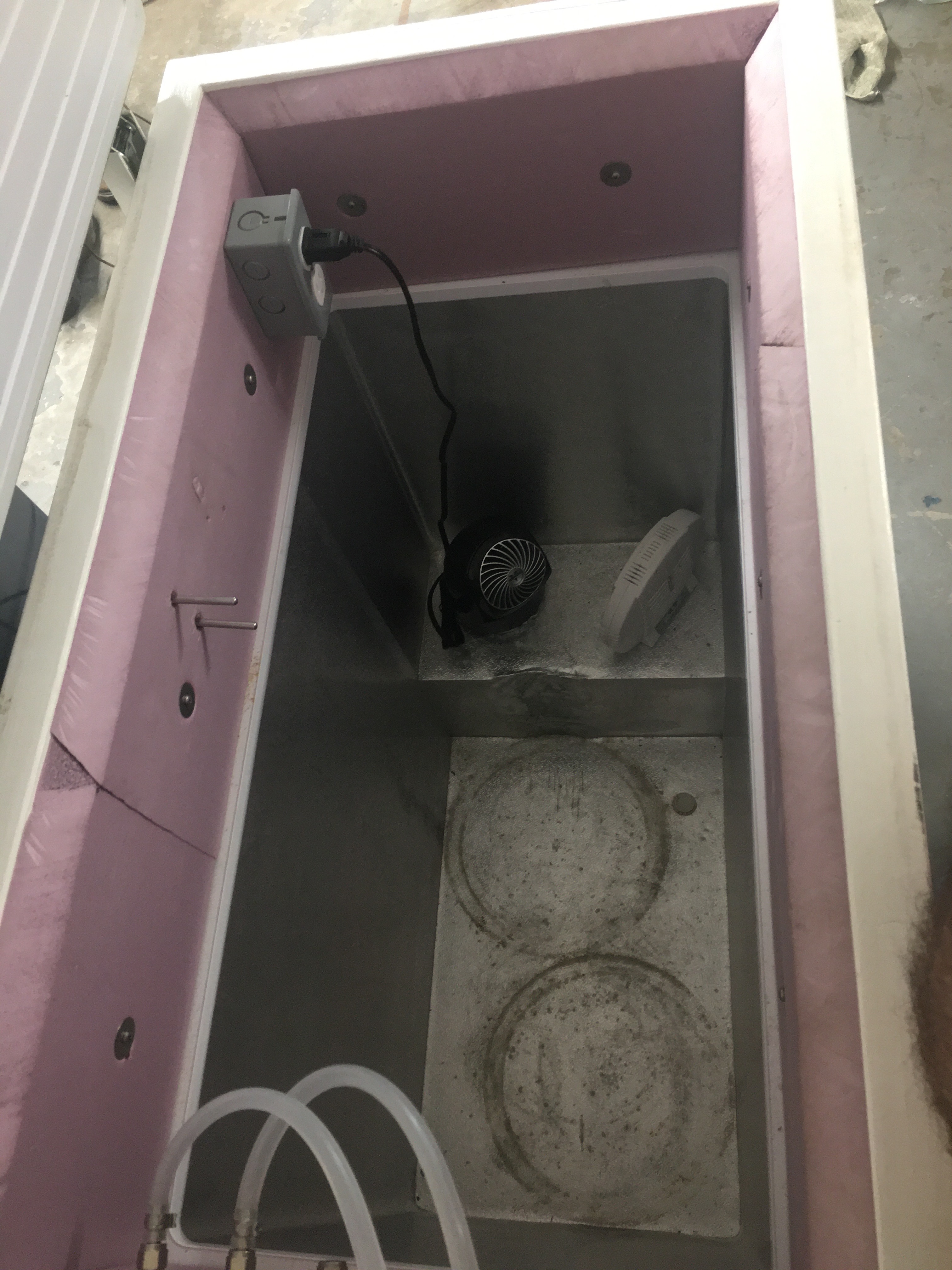
Regarding sensor placement, you are absolutely correct.
I froze 3 kegs of beer about a year ago because of this; sad day.
I found about a 10°F difference from the top of the freezer to the bottom.
I left one sensor where you see it know, and placed the second in a thin plastic ball resting on the bottom of the freezer.
Adding the fan that blows very hard at an angle (azimuth & elevation) reduced the temperature difference to less than 0.1°F.
And it is pretty much instant.
If you open the lid the two probes would drift apart.
Closing the lid, the two stabilize within a couple of seconds.
I’m convinced probe placement is not an issue here (with the fan on all the time).