First up, this isn’t really a complaint - I love my BrewPi and it works fantastically almost all of the time. However, I do have one persistent issue that puzzles me, which is that I always get a slight overshoot when heating (much less so on cooling).
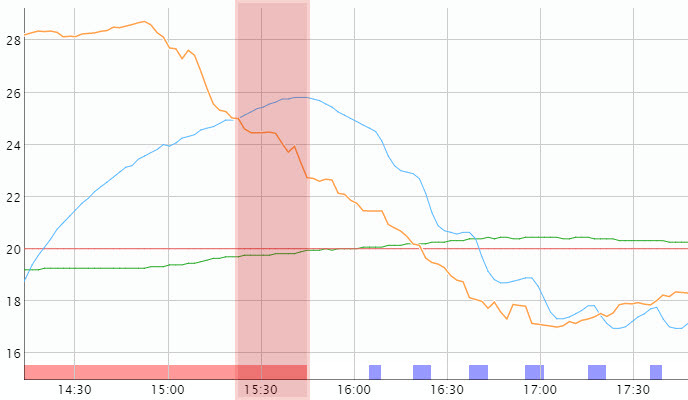
This example image shows what I am talking about. This is just after pitching, and I am bringing the beer up to a constant 20C. What I can’t understand is why the heater stays on even after the fridge temp has reached the target - here you can see that it stays on for about another 15 minutes, which cases the beer to overshoot by about 0.5C. When cooling, it behaves much more like I would expect a PID to behave; it cools for a while, then shuts off even before the target is achieved and waits for the beer to catch up.
Is this fixable?
{
"kind": "Control",
"pids": [
{
"kind": "Pid",
"name": "heater1",
"enabled": true,
"setPoint": {
"kind": "SetPointSimple",
"name": "fridgeset",
"value": 7
},
"inputSensor": {
"kind": "TempSensorFallback",
"onBackupSensor": false,
"sensor": {
"kind": "TempSensor",
"name": "fridge",
"sensor": {
"kind": "OneWireTempSensor",
"value": 8.6875,
"connected": true,
"address": "284D14C207000006",
"calibrationOffset": 0
}
}
},
"inputError": 2.4531,
"Kp": 10,
"Ti": 600,
"Td": 60,
"p": -24.5313,
"i": 0,
"d": 0.1953,
"actuatorIsNegative": false,
"outputActuator": {
"kind": "ActuatorPwm",
"value": 0,
"period": 4,
"minVal": 0,
"maxVal": 100,
"target": {
"kind": "ActuatorMutexDriver",
"mutexGroup": {
"kind": "ActuatorMutexGroup",
"deadTime": 1200000,
"waitTime": 0
},
"target": {
"kind": "ActuatorPin",
"state": false,
"pin": 16,
"invert": false
}
}
}
},
{
"kind": "Pid",
"name": "heater2",
"enabled": true,
"setPoint": {
"kind": "SetPointSimple",
"name": "beer2set",
"value": null
},
"inputSensor": {
"kind": "TempSensor",
"name": "beer2",
"sensor": {
"kind": "OneWireTempSensor",
"value": 11.625,
"connected": true,
"address": "285B4FC107000082",
"calibrationOffset": 0
}
},
"inputError": null,
"Kp": 10,
"Ti": 600,
"Td": 60,
"p": 0,
"i": 0,
"d": 0,
"actuatorIsNegative": false,
"outputActuator": {
"kind": "ActuatorPwm",
"value": 0,
"period": 4,
"minVal": 0,
"maxVal": 100,
"target": {
"kind": "ActuatorMutexDriver",
"mutexGroup": {
"kind": "ActuatorMutexGroup",
"deadTime": 1200000,
"waitTime": 0
},
"target": {
"kind": "ActuatorNop",
"state": false
}
}
}
},
{
"kind": "Pid",
"name": "cooler",
"enabled": true,
"setPoint": {
"kind": "SetPointSimple",
"name": "fridgeset",
"value": 7
},
"inputSensor": {
"kind": "TempSensorFallback",
"onBackupSensor": false,
"sensor": {
"kind": "TempSensor",
"name": "fridge",
"sensor": {
"kind": "OneWireTempSensor",
"value": 8.6875,
"connected": true,
"address": "284D14C207000006",
"calibrationOffset": 0
}
}
},
"inputError": 2.4531,
"Kp": 10,
"Ti": 1800,
"Td": 200,
"p": -24.5313,
"i": 0,
"d": 0.6641,
"actuatorIsNegative": true,
"outputActuator": {
"kind": "ActuatorPwm",
"value": 23.8672,
"period": 1200,
"minVal": 0,
"maxVal": 100,
"target": {
"kind": "ActuatorMutexDriver",
"mutexGroup": {
"kind": "ActuatorMutexGroup",
"deadTime": 1200000,
"waitTime": 0
},
"target": {
"kind": "ActuatorTimeLimited",
"minOnTime": 0,
"minOffTime": 180,
"maxOnTime": 65535,
"state": false,
"target": {
"kind": "ActuatorPin",
"state": false,
"pin": 17,
"invert": false
}
}
}
}
},
{
"kind": "Pid",
"name": "beer2fridge",
"enabled": false,
"setPoint": {
"kind": "SetPointSimple",
"name": "beer1set",
"value": null
},
"inputSensor": {
"kind": "TempSensor",
"name": "beer1",
"sensor": {
"kind": "OneWireTempSensor",
"value": 8.625,
"connected": true,
"address": "28E36AC207000086",
"calibrationOffset": 0
}
},
"inputError": null,
"Kp": 10,
"Ti": 15000,
"Td": 0,
"p": 0,
"i": 0,
"d": 0,
"actuatorIsNegative": false,
"outputActuator": {
"kind": "ActuatorSetPoint",
"targetSetPoint": {
"kind": "SetPointSimple",
"name": "fridgeset",
"value": 7
},
"targetSensor": {
"kind": "TempSensor",
"name": "fridge",
"sensor": {
"kind": "OneWireTempSensor",
"value": 8.6875,
"connected": true,
"address": "284D14C207000006",
"calibrationOffset": 0
}
},
"referenceSetPoint": {
"kind": "SetPointSimple",
"name": "beer1set",
"value": null
},
"output": 127.9961,
"achieved": 127.9961,
"minimum": -10,
"maximum": 10
}
}
]
}